3R4R5R雷蒙机

河南威石机械有限公司
河南威石机械有限公司. 河南威石机械是专业生产粉碎机械设备的厂家,主要生产:3r4r5r雷蒙磨粉机,超细磨粉机,摆式磨粉机,气流分级机,圆锥破碎机,偏心振动磨等破碎粉碎 阿里巴巴3r4r5r大中型雷蒙磨粉机高锰钢磨环磨辊13锰材质经久耐用,研磨机,这里云集了众多的供应商,采购商,制造商。这是3r4r5r大中型雷蒙磨粉机高锰钢磨环磨辊13锰材质经 3R4R5R大中型雷蒙磨粉机高锰钢磨环磨辊13锰材质经久耐用创锦机械主要生产大型雷蒙磨,大型雷蒙磨型号有4121磨机、130磨机、160磨机等,在郑州市场好多厂家只能做到130型,...全套高压磨粉机 3R4R5R雷蒙磨粉机 脱硫石灰粉雷蒙磨粉机

3R雷蒙磨-黎明重工科技股份有限公司 - lmlq
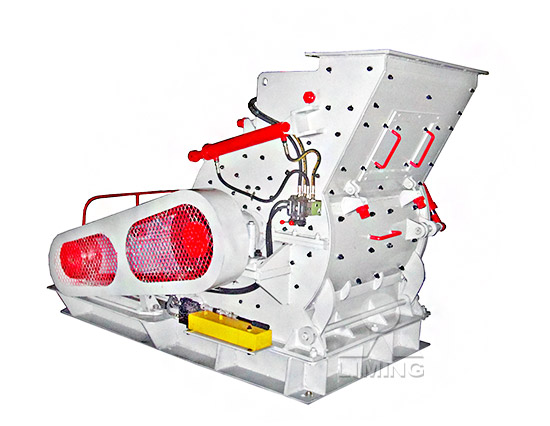
按照国际标准来划分,雷蒙磨粉机型号大致可以分为3r雷蒙磨、4r雷蒙磨、5r雷蒙磨、6r雷蒙磨等,其中,r指的是雷蒙磨的磨辊,前面的数字代表了磨辊的数量。2014年7月9日 雷蒙磨规格有3R、4R、5R、6R,那么雷蒙磨的R代表的是什么意思呢?其实R就是英文Roller,即是磨辊;3、4、5、6表示数量,所以3R代表3个磨辊,4R代表4个磨辊。比如4R3216雷蒙磨就是,磨辊有4 R型雷蒙磨粉机的规格型号:3R、4R、5R、6R-- 红星机器r型磨粉机具有效率高、耗能低、占地面构特征积小、资金投入少及环境无污染等优点。 1、雷蒙磨立体结构,占地面积小,成套性强,从块料到成品粉子独立自成一个生产体系。3r4r5r-小型雷蒙磨 大型磨粉机-河南开拓机械有限公司

3R\4R\5R雷蒙机石粉磨粉机碳酸钙_雷蒙磨-河南黎明重
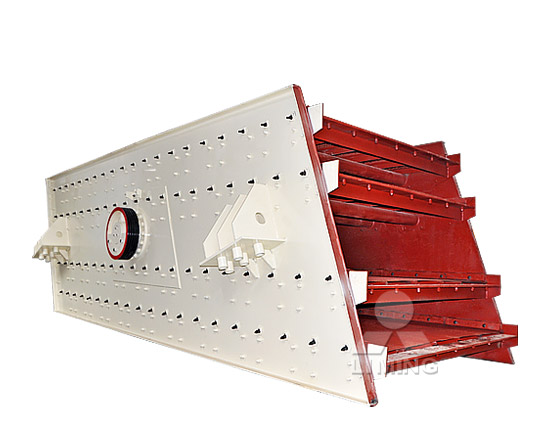
4r和5r雷蒙机与3r区别是磨辊有 4、5个,产能处理量稍大些,出料细度相对细一些。 雷蒙机的性能优势: 1、系统性强,通筛率高 . 整机为立体结构,占地面积小,系统性强,从原材料的粗加工到输送到制粉和包装,可自成 黎明重工科技专业生产破碎机,制砂机,碎石机,磨粉机,移动破碎站系列产品。主要产品有雷蒙磨粉机,立式磨粉机,欧版磨粉机,磨粉机,矿渣磨粉机, 磨煤机,中速磨煤机,高压悬辊磨粉机等 3R4R5R超细雷蒙磨粉机r型磨粉机具有效率高、耗能低、占地面构特征积小、资金投入少及环境无污染等优点。 1、雷蒙磨立体结构,占地面积小,成套性强,从块料到成品粉子独立自成一个生产体系。3r4r5r-小型雷蒙磨 大型磨粉机-河南开拓机械有限公司 ...

5r雷蒙机-5r雷蒙机价格、图片、排行 - 1688阿里巴巴
巩义市. 5r雷蒙机品牌/图片/价格 - 5r雷蒙机品牌精选大全,品质商家,实力商家,进口商家,微商微店一件代发,阿里巴巴为您找到3,309个有实力的5r雷蒙机品牌厂家,还包括价 内容提示: 文章编号:1004 -2539(2016)08 -0038 -05 DOI:10.16578/j. issn.1004.2539.2016.08.0093 - RRR 平面并联机器人工作空间边界求解和灵活性研究曹丽亚 崔建昆 宋亚楠(上海理工大学 机械工程学院,上海 200093)摘要 提出了求解平面并联机器人工作空间边界的基于迭代搜索法的圆周式搜索算法,并 ...3-RRR平面并联机器人工作空间边界求解和灵活性研究2019年2月3日 3-RRR球面并联机构优化设计研究杨健,周鑫,柳伟兵,赵宏宇(成都理工大学核技术与自动化工程学院,四川成都610059)来稿日期:018-0-0基金项目:机器人国家高技术863-809专题专家组;成都理工大学机械工程创新团队(1091-JXTD01501)作者简介:杨健,(197-),女,重庆人,博士研究生,副教授 ...3-RRR球面并联机构优化设计研究 - 道客巴巴

3-RRR平面并联机构的拓扑结构优化及其运动学性能改善
摘要: 典型3-RRR平面并联机构是一种具有两平移一转动输出的平面定位、传送装置,其应用较广。 首先计算出该机构的耦合度k=1;其次,基于结构降耦原理,设计出一种零耦合度(k=0)的平面定位传送降耦机构,从而极易求得其位置正解解析式,且使得动平台的输入-输出具有运动解耦性;进一步,对 ...提出一种基于机构奇异和运动传递性能指标的高速并联机器人运动学优化设计策略.优化设计过程分为两步:首先构造了无量纲参数设计空间,在设计空间中,研究了3-rrr机构的奇异和可用工作空间,分析了机构奇异曲线的分布特点,确定了无内部奇异的 3-rrr机构的参数取值范围;然后以全局条件数 ...3-RRR高速并联机器人运动学设计与实验 - sia.cn摘要: 机构学和运动分析作为机构研究的基本内容,在机构的研发过程中处于重要的基础性地位,并为机构的应用和推广提供了重要的,必不可少的理论依据。3/3-RRRS并联机器人机构的研究 - 百度学术

基于绝对节点坐标法的平面3-RRR并联机构动力学分析
分类号:TH113单位代码:10190研究生学号:201501027密级:公开硕士学位论文夏椰林2018年6月基于绝对节点坐标法的平面3-RRR并联机构动力学分析DynamicsAnalysisofPla..2013年11月1日 摘要 分析了球面并联机构(SPM)工作范围受限的原因。本研究还开发了一种系统设计方法(Least Interference Design Methodology,LIDeM),用于减少连杆之间的干扰并增加机构的工作空间。针对3-RRR SPM,根据LIDeM理论给出了最优结构。通过对其数学模型的数值模拟,得到了修正连杆比β 1 和β 2 的最佳值。3-RRR球面并联机构干涉分析及工作空间优化,Mechanism and ...3-rrp平面并联机构的机构简图如图1所示. 该机构可以实现2个平移和1个转动,由静平台、动平台和3个完全对称分布的运动支链组成,每条支链都是由2个转动副和1个移动副组成,移动副为末端支链与动平台相连.3-RRP平面并联机构的工作空间和灵巧度分析 - 百度文库
3-RRR球面并联机构数控系统开发 - 豆丁网
2015年1月24日 天津大学硕I哮位论文 摘 要 本文密切结合国家“863”高技术发展项目,以开发“3-RRR”球面并联机 构的数控回转台样机为目标,以机器人机构学、计算机控制技术、软件工程学 为基础,研究了并联机构轨迹控制、多任务实时调度、数控系统建造方法,取 得了以下研究成果: 在轨迹控制方面,导出 ...摘要: 由于具有紧凑的空间布局和良好的结构刚度等特点,3自由度球面并联机构在肩,腕等多自由度关节的设计方面具有潜在的优势,但现有球面机构设计方法未结合人体肩关节工作空间呈非对称形貌,灵巧运动能力呈非对称分布的特点开展针对性的设计.本文以3-RRR非对称球面并联机构为原型,开展假肢 ...基于3-RRR非对称球面并联机构的假肢肩关节机构优化设计介绍了称为“Agile-Eye”的 3-RRR(R - 旋转关节)球形并联机构的兼容版本。这种顺应性球面并联机构 (CSPM) 的运动静态分析是使用顺从矩阵法 (CMM) 进行的,评估两种不同类型的旋转顺从接头 (RCJ) 和三个输入。称为“Agile-Eye”的 3-RRR 球形并联机构的兼容版本 ...

3-RRR球面并联机器人运动干涉检查及工作空间研究
为了将3-RRR球面并联机器人用于空间定位跟踪的执行机构,以欧拉角描述机器人末端动平台的姿态,建立机器人位置方程,得到了关节转角的表达式。用几何分析的方法给出了机器人具有姿态空间的必要条件以及各关节必须满足的结构约束。将球面机构的连杆表示为球面上的大圆弧,连杆发生的运动 ...In this paper, a reconfigurable parallel wrist manipulator, which is based on a coaxial actuated spherical mechanism with full-circle twist, is presented. The reconfiguration of the wrist is realized through a simple four-bar linkage in each independent limb to change one geometric parameter for variations of performances, which eases motion control. The A 3-RRR Spherical Parallel Manipulator Reconfigured with 摘要: 采用Lagrange方法建立球面3-RRR并联机构基于动平台姿态参数的动力学模型.考虑在计算过程中采用线密度,厚度忽略等近似计算及工作过程中机构的磨损等微小变化造成的参数不确定性,进一步建立带参数不确定性的动力学模型.针对其在振动测试中的重复性动作等特点及参数不确定性设计鲁棒-自 ...球面3-RRR并联机构动力学建模与鲁棒-自适应迭代学习控制

Unified infinitesimal kinematics of a 3-RRR/PRR six-degree
2023年3月11日 In this work, the kinematics of a parallel-serial manipulator is approached by means of geometric algebra and the theory of screws. The proposed hybrid robot manipulator is composed of a 3-RRR planar parallel manipulator and a spatial PRR serial manipulator attached to the center of the moving platform of the lower 3-RRR parallel 摘要: 众所周知,并联机器人具有大刚度、高精度、高承载能力等优点,被广泛应用于大质量负载、精密定位或高速运动等应用 ...平面3-RRR并联机器人控制研究 - 百度学术摘要 为了将 3-rrr 球面并联机器人用于空间定位跟踪的执行机构,以欧拉角描述机器人末端 动平台的姿态,建立机器人位置方程,得到了关节转角的表达式。3-RRR球面并联机器人运动干涉检查及工作空间研究 ...

3-RRR球面并联机器人正向运动学分析 - 机械传动
针对球面3自由度并联机器人所有关节均为转动关节且关节轴线汇交于一点的结构特点,借助球面上大圆弧与四元数代数的对应关系,将构件的位置用四元数表示。采用四元数的乘积描述关节转动引起的构件位置的变化,通过球面上大圆弧几何加法与四元数乘法之间的对应关系,得到关节轴线的方向 ...摘要: 球面3-rrr机器人具有十分广阔的应用前景,是目前机器人研究领域重要的研究方向之一。本文以球面3-rrr机器人为研究对象,从新型结构的构建、工作空间优化、运动路径规划、运动分析、控制方法等若干方面,进行了深入的研究。新型球面3--RRR并联机器人的构建及其性能研究 - 百度学术2012年5月27日 摘要 3-RRRU型并联机器人作为本文的研究对象,在查阅了大量国内外相关文献的基 础上,对于少自由度并联机器人的运动学、动力学特性也有了一定程度上的了解。并..3-RRRU并联机器人运动学及动力学建模与仿真 - 豆丁网